 von Feldern in Rio Grande do Sul, Brasilien vom 12. 4. 2020 (Planet)")
Seevermessung
Seevermessung ist zum einen die topographische Aufnahme des Meeresbodens und der Wattflächen, zum anderen die Ortsbestimmung von unbewegten Objekten auf See über und unter dem Wasser. Die Aufnahme des Meeresbodens und der Wattflächen ist dabei die Aufgabe der Seevermessung im engeren Sinne. Zur Vermessung gehören die Erfassung, die Auswertung, die Modellierung und die Präsentation der Morphologie, die Beschaffenheit und Gestalt des Bodens. Das eigentliche Aufgabenfeld ist vielseitiger. Daneben sind aber vor allem auf dem Seegrund Objekte aufzunehmen, die für die Schifffahrt von Bedeutung sind (z.B. Wracke). Die Seevermessung ist somit ein Teil der Geomatik (Geodäsie und Geoinformatik).
Die topographische Aufnahme des Meeresbodens und einzelner Objekte auf dem Meeresboden ist eine wesentliche Voraussetzung für die sichere und wirtschaftliche Schifffahrt. Aber auch für andere Aufgaben bilden die Vermessungsergebnisse wichtige Grundlagen (z.B. Küstenschutz, Umweltschutz, Meereskunde, Wasserbau, Archäologie).
Für die Messung der Tiefe werden in der Regel Vertikalecholote verwendet. Für bestimmte Gebiete ist es erforderlich, flächendeckend zu vermessen. Für solche Zwecke kommen Fächerlote zum Einsatz, die eine Überdeckung des Seegrundes von einem mehrfachen der Wassertiefe erreichen.
Der U.S. Geological Survey sammelt mit Hilfe eines Forschungsschiffes Daten, um den Meeresboden und die darunter liegenden geologischen Verhältnisse zu kartieren. Differential Global Positioning Systeme (DGPS) leiten das Schiff und die Position der Ausrüstung.
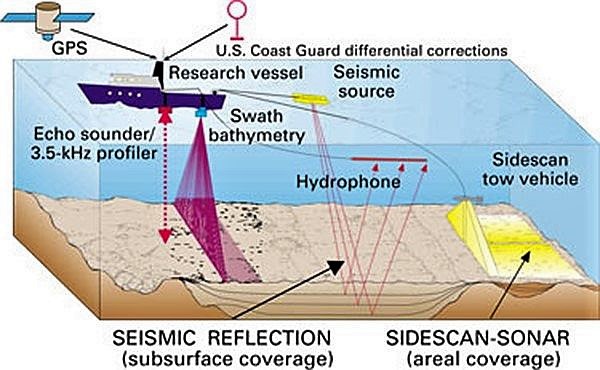 | Meeresboden-Kartierung (USGS, Woods Hole) Ein einstrahliges Echolot misst die Wassertiefe und liefert ein kontinuierliches Profil des Meeresbodens unter dem Schiff. Dabei sendet und empfängt ein 3,5-kHz-Profiler Schallpulse, die ca. 5 - 10 m in den Meeresboden eindringen. Ein interferometrisches Bathymetrie-Sonarsystem misst die Wassertiefe und die Intensität des vom Meeresboden reflektierten Schalls; dazu sendet ein am Schiffsrumpf befestigter Messwertwandler (transducer) einen Schallfächer aus, der vom Meeresboden reflektiert und am Wandler wieder empfangen wird. Beim Verfahren der hochauflösenden Reflexionsseismik sendet eine hinter dem Schiff hergezogene Schallquelle Akustikpulse, die vom Meeresboden und darunter liegenden Schichten reflektiert werden. Ebenfalls nachgeschleppte Hydrophone oder in die Schallquelle eingebaute Hydrophone empfangen die zurückkommenden Signale. |
Allen Echolotsystemen liegt das Prinzip der Laufmessung eines Schallsignals zugrunde. Der Sender (Schwinger) des Echolotes strahlt einen Ultraschallimpuls aus. Die Schallwellen werden an der Gewässersohle reflektiert und von dem Schwinger, der auch gleichzeitig als Empfänger dient, wieder empfangen. Die Laufzeit der Schallwellen wird gemessen und bei bekannter Ausbreitungsgeschwindigkeit des Schalls durch Wasser kann die Wassertiefe ermittelt werden.
Bei der Single-Beam-Echolotung (Vertikalecholotung) wird der Gewässergrund unter dem Schiff mit einem lotrecht ausgesandten Einzelstrahl abgetastet. Da die gemessenen Wassertiefe von der Wasserschallgeschwindigkeit abhängig ist, muss sie vor jeder Messung ermittelt und am Echolot eingestellt werden. Sie ist in erster Linie von Temperatur und Salzgehalt abhängig und bewegt sich zwischen 1400 m/sec und 1550 m/sec.
Bei diesem Verfahren werden anhand vorgegebener Profile Linien in Längs- und Querrichtung abgefahren. Der Linienabstand wird je nach Aufgabenstellung so gewählt, dass ein Peilgebiet mit vertretbarem Aufwand abgearbeitet werden kann.
Bei der Fächerecholotung sendet der Schwinger fächerartig mehrere Messstrahlen (Beams) gleichzeitig quer zur Bewegungsrichtung des Schiffs aus. Bei der Messfahrt wird ein Streifen abgedeckt, dessen Breite vom Öffnungswinkel und von der Wassertiefe abhängig ist. Um zu streng lotrechten Tiefen zu gelangen, müssen alle Schiffbewegungen erfasst werden. Daher ist ein Bewegungssensor, der die Hub-, Roll- und Stampfbewegungen (Heave, Roll, Pitch) des Schiffes ermittelt, in das Messsystem integriert. Zur Orientierung der Fächerrichtung ist weiterhin ein Kreiselkompass in das System eingebunden. Mit Hilfe der Fächerecholotung erhält man hoch auflösende Geländemodelle.
Hochaufgelöste Informationen über den Meeresboden um Schottland unter Verwendung von Fächerecholoten sind von Wissenschaftlern, Schifffahrtsbehörden und von Privatfirmen zusammengetragen worden. Die Methode sammelt hauptsächlich Tiefeninformationen, die die Gestalt des Meeresbodens enthüllen, aber sie kann auch akustische Bilder der physischen Eigenschaften des Meeresbodens liefern, die für detaillierte und genaue geologische Karten des Meeresbodens verwendet werden. Der britische Geologische Dienst hat für die meisten seiner jüngeren Untersuchungen die Fächerecholot-Technologie eingesetzt.
Die Informationen sind nicht nur für Meeresingenieure von Bedeutung, sondern z.B. auch für Meeresbiologen, die die Lebensräume von Meereslebewesen besser kartieren können.
Grafik: Computer-simulierter 'Flug' durch die Firth of Forth-Brücken aus Fächerecholot-Daten
Die Daten für das folgende Bild wurden aus einem kleinen Gebiet des Firth of Forth im Bereich der Straßen- und Eisenbahnbrücken zusammengetragen. Durch die Verwendung von 'Fly-through'-Software kann der Meeresboden im Detail studiert werden, um geologische Eigenheiten wie das anstehende magmatische Gestein zu identifizieren. Die Bilder zeigen deutlich, wie die Architekten diesen Gesteinsausbiss nutzten, um den beiden Brückenkonstruktionen ein gutes Fundament zu bieten. Die tiefe Rinne (bis 65 m Tiefe) im Zentrum des Meeresarms (firth) wurde vom Eis ausgeschürft, als dieses während der letzten Eiszeit (vor über 10.000 Jahren) die Landschaft bedeckte.
Material, das von den Gletschern transportiert wurde, formte Sedimentrücken oder Endmoränen an der Frontseite des Gletschers, wenn seine Ausdehnung in einem Stillstand verharrte. Diese Moränen sind erkennbar an der meerwärtigen Seite der Forth-Brücke. Jüngere Sedimentbewegungen durch Strömungen und Gezeiten sind am Meeresboden in Gestalt von Rippelmarken erkennbar. In Gebieten mit steilen Hängen oder wo die Sedimente durch menschliche Aktivitäten gestört wurden, zeigen sich submarine Hangrutschungen. Auch weitere Hinweise auf menschliche Nutzung der Meeresumwelt, wie z.B. Schiffswracks, sind in den Sonarbildern deutlich erkennbar.
Computer-simulierter 'Flug' durch die Brücken am Firth of Forth aus Fächerecholot-Daten 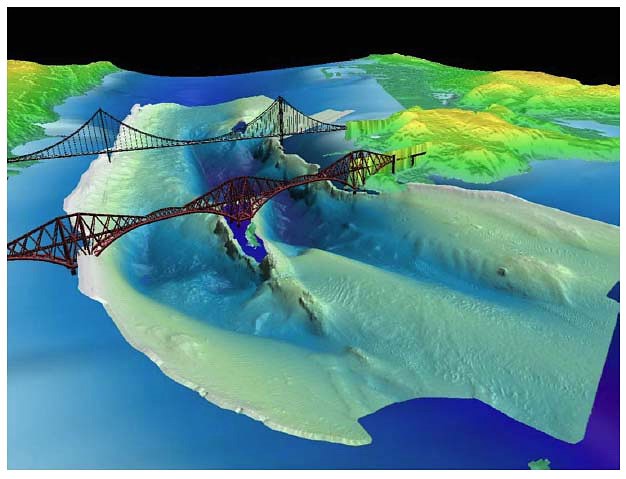 Quelle: The Scottish Government Quelle: The Scottish Government |
Weitere Informationen:
- Seevermessung (BSH)
- WHSC Sea-Floor Mapping (USGS HWSC)