 von Feldern in Rio Grande do Sul, Brasilien vom 12. 4. 2020 (Planet)")
SONAR
Engl. Akronym für Sound Navigation and Ranging, dt. etwa Navigation und Entfernungsmessung durch Wasserschall; Bezeichnung für eine Messtechnik zur Ortung und Vermessung von Gegenständen vorwiegend unter Wasser mit Hilfe des Echos von Schall- oder Ultraschallwellen, gleichzeitig auch die Bezeichnung für die Messgeräte selbst. Sonar nutzt die Tatsache aus, dass sich Schall unter Wasser insbesondere bei hohen Frequenzen sehr viel verlustärmer ausbreitet als in der Luft.
Die grundsätzliche Funktionsweise dieser 'aktiven' Sonar-Systeme ist immer gleich: Es wird eine Schallwelle erzeugt, das Echo registriert und aus der gemessenen Laufzeit der Welle die Entfernung zum reflektierenden Objekt errechnet. Bei herkömmlichen Sonar-Systemen wird der Schall gebündelt und in eine genau definierte Richtung emittiert; aus der Laufzeit des Echos kann daher die Lage des reflektierenden Objektes im dreidimensionalen Raum errechnet werden.
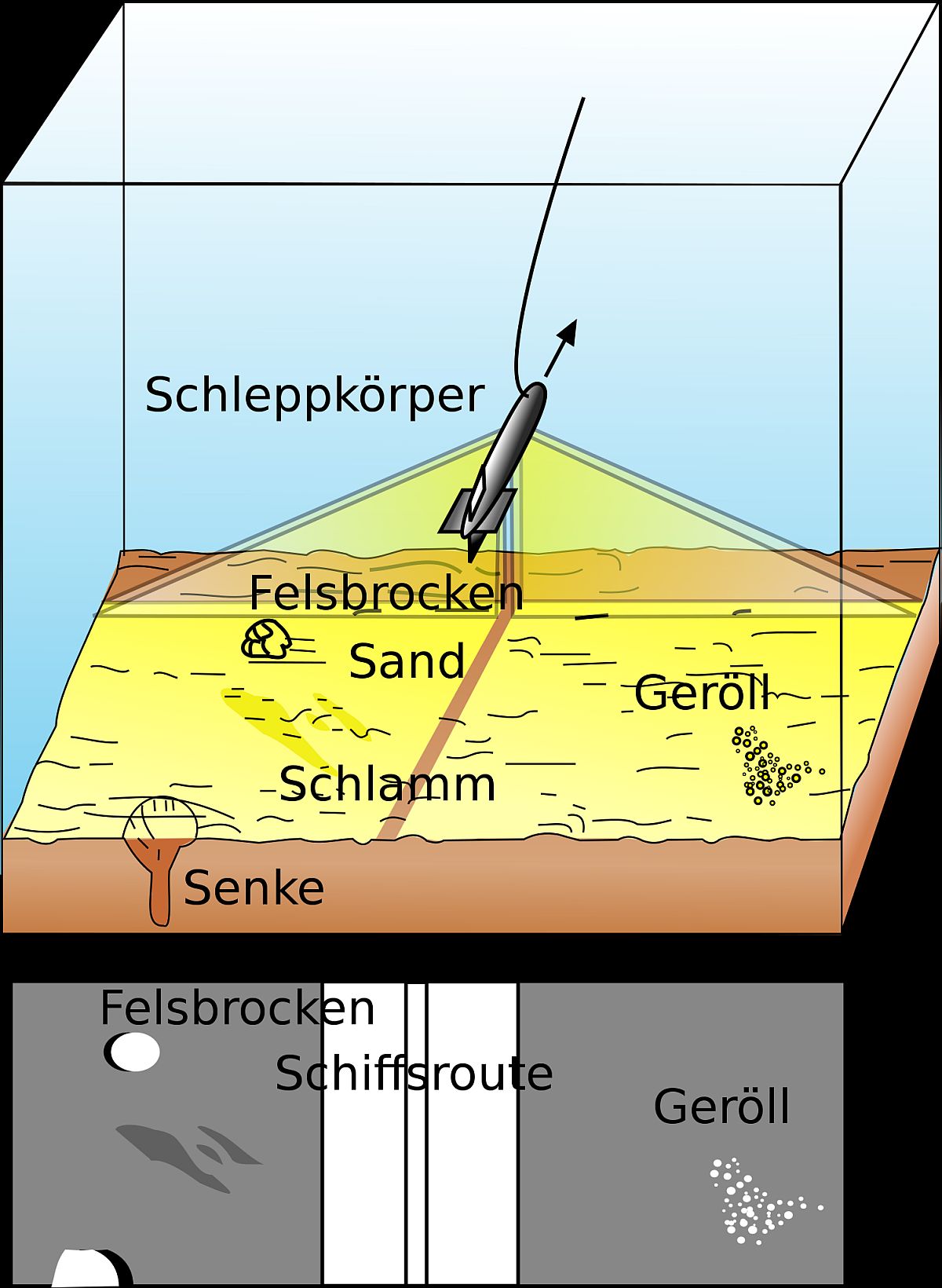 | Seitensichtsonar (Side-Scan Sonar) Zur Erhebung von bildfähigen Daten des Meeresbodens mit einem Seitensichtsonar zieht man das Instrument über das Untersuchungsgebiet. Das von einem Schiff geschleppte Gerät ist mit einer gereihten Anordnung von Messwertgebern ausgerüstet, die Akustikimpulse in einem bestimmten Frequenzbereich aussenden und später wieder empfangen. Die Gestalt des Akustikimpulses ist quer zur Bewegungsrichtung breit (Fächerform) und in Bewegungsrichtung schmal. Die akustische Energie, die vom Sonargerät empfangen wird, liefert Informationen zur allgemeinen Verbreitung und Charakteristik der oberflächennahen Sedimente und Gesteinsausbisse. Wenn alle anderen Parameter konstant sind, streut eine rauere Oberfläche i.a. stärker zurück als eine glattere Oberfläche. Schatten resultieren aus Stellen ohne Energierückfluss, wie z.B. die Schatten von großen Felsblöcken oder gesunkenen Schiffen und tragen so zur Interpretation des Sonogramms bei. In der Grafik rechts erscheinen starke Reflexionen (high backscatter) , z.B. von Felsblöcken, Kies und vertikale Strukturen im Sonogramm hellgrau, schwache Reflexionen (low backscatter) von feinerem Sediment oder Schatten sind dunkelgrau. Quelle: Woods Hole Science Center |
Anders verhält es sich beim Sidescan-Sonar (engl. side-scan sonar, Kurzform: SSS): Hier werden gleichzeitig zwei fächerförmige Impulse ("pings") quer zur Fahrtrichtung des Schiffes ausgesendet, jeweils einer nach links und einer nach rechts. Dieses zwei pings erzeugen durch ihre breite Fächerform eine große Anzahl an Echos, ohne dass jedoch die Richtung, aus der diese Echos kommen, bekannt wäre; die einzigen bekannten Parameter sind die Dauer ihrer Laufzeit und ihre Intensität. Es ist daher nicht möglich, mit herkömmlichen Methoden aus diesen Daten dreidimensionale Geländemodelle zu erstellen, vielmehr ähneln die Ergebnisse Luftbildern: auch in diesen sind keine dreidimensionalen Daten enthalten, sie stellen lediglich die Projektion einer Szene auf eine Ebene dar.
Mit Side-Scan Sonar können Objekte geortet werden, die mit optischen Mitteln in trübem Wasser nicht aufzufinden sind. Die Frequenzen, mit denen Sidescan-Sonare betrieben werden, bewegen sich zwischen 6,5 kHz und 1 MHz, die Reichweite kann zwischen wenigen Metern und 60 km betragen, und die Auflösung reicht von wenigen Zentimetern bis zu 60 m; wie bei allen auf der Emission von Wellen basierten Systemen (Radar/Bodenradar, Lidar) gilt auch für Sonar-Systeme der Zusammenhang zwischen Frequenz, Auflösung und Reichweite: höhere Frequenzen bringen eine bessere Auflösung bei einer geringeren Reichweite. Viele moderne Systeme können deshalb mit verschiedenen Frequenzen betrieben werden, um sie möglichst vielseitig einsetzen zu können.
Seitensichtsonare werden sowohl im militärischen Bereich (U-Bootjagd, Minenortung etc.) als auch in der Wissenschaft (Biologie, Geologie, Unterwasser-Archäologie) und im privaten Bereich (Schifffahrt allgemein, Fischerei) eingesetzt, und Rettungsorganisationen verwenden hochauflösende Sonar-Systeme zur Ortung Ertrunkener.
Echolote (Echo-Sounder), Fächerecholote (Multibeam-Echosounder) und Sedimentsonare (Subbottom-Profiler) sind Systeme, die auf den gleichen technischen Grundlagen basieren, jedoch mit anderen Frequenzen und Messgeometrien arbeiten; auch die Art der Datenauswertung unterscheidet sich zum Teil erheblich von den bei Sidescan-Sonaren angewendeten Methoden.
Neben dem bisher beschriebenen aktiven SONAR gibt es auch 'passives Sonar'. Dabei werden nur die von Objekten (Schiffe, Wale usw.) eigenständig generierten Signale bzw. Geräusche empfangen. Das passive Sonar sendet selbst keine Schallwellen aus und ist daher, im Gegensatz zum aktiven Sonar, nicht zu orten. Der Begriff kann sich auch auf den passiven Betriebsmodus eines auch zum aktiven Senden fähigen Ortungssystems beziehen. In beiden Betriebsarten kann die Richtung des einfallenden Schalles bestimmt werden, eine präzise und verlässliche Entfernungsmessung ist jedoch oft nur im aktiven Betriebsmodus möglich.
Weitere Informationen: